
Omkar Bisale, Aditya Bhosale, Chirag Dhokchawale, Vaibhav Kalagate Electronics and Telecommunication Engineering, Genba Sopanrao Moze College of Engineering, Pune, India
Abstract :-
This mini project explores the conceptualization, design, and development of a multi-functional drone capable of executing five distinct tasks through the integration of modular and interchangeable components. The need for such a versatile system is growing rapidly across various domains, including agriculture, surveillance, logistics and delivery, environmental monitoring, and disaster management. Traditional drones often lack adaptability, making them inefficient for multi-purpose use. In contrast, this project aims to overcome such limitations by developing a drone platform that supports quick module replacement, allowing it to perform varied functions without requiring a complete overhaul of the system.
Introduction:-
Unmanned Aerial Vehicles (UAVs), commonly referred to as drones, are increasingly finding their place across various industries such as agriculture, logistics, emergency response, advertising, and surveillance. The advantage of deploying drones includes lower operational costs, faster response time, accessibility to remote regions, and automation. However, the existing systems typically support only one functionality. This project aims to bridge that gap by designing a drone that can execute six functionalities using a modular attachment system. Each module is easily detachable and replaceable, enabling the user to adapt the drone for specific applications quickly.
Problem Statement:-
Drones available in the current market are designed for single-function applications. For instance, a drone meant for agricultural spraying cannot be easily used for food delivery or surveillance. As a result, users are compelled to purchase and maintain multiple drones for different tasks, leading to higher operational costs, increased storage requirements, and limited deployment flexibility. There is a growing demand for a cost-effective, modular drone that can perform a wide range of tasks with a single flight platform.
Objective:-
– Develop a robust, reusable drone platform.
– Implement a modular attachment system to support flower dropping, food delivery, first aid assistance, agricultural spraying, advertisement, and surveillance.
– Ensure that the drone can be controlled both manually and autonomously via GPS-based navigation.
– Maintain balance and stability under various payload conditions.
– Provide quick attachment replacement without requiring technical expertise.
Need of Project:-
This project serves as a potential solution for resource-limited environments where a single UAV performing multiple tasks can significantly reduce costs and improve service delivery. For instance, rural health workers could use the drone for both first aid delivery and agricultural spraying, eliminating the need for two separate drones. This makes the platform attractive to government agencies, NGOs, educational institutions, and private firms involved in logistics, farming, or emergency services.
Literature Review:-
Research from IEEE and other drone technology journals highlight advancements in modular drones. According to Stanford Robotics Lab (2020), modularity in drone architecture significantly improves flexibility and usability in field operations. DJI’s agricultural drone systems offer insight into autonomous spraying and area coverage, while MIT’s modular drones demonstrate rapid module switching in combat and rescue scenarios. These findings inspired our project’s goal of achieving high functionality with reduced hardware redundancy.
Literature Survey:-
1 – Modular UAV Systems , MIT Robotics Lab ,2020 ,Emphasized modular payload switching and automation
2 – UAV in Smart Agriculture ,IEEE Spectrum ,2021 ,Demonstrated pesticide spraying drones and yield impact
3 – UAV for Emergency Response, Elsevier ,2019 ,Highlighted first aid delivery and rescue missions
Development of System:-
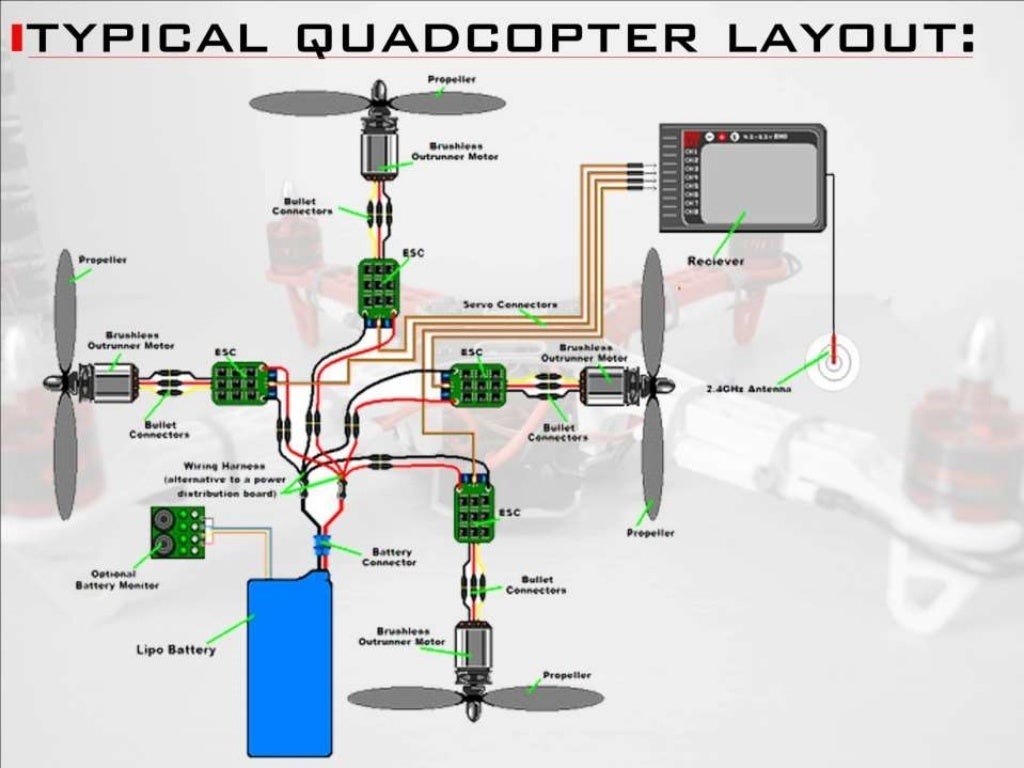
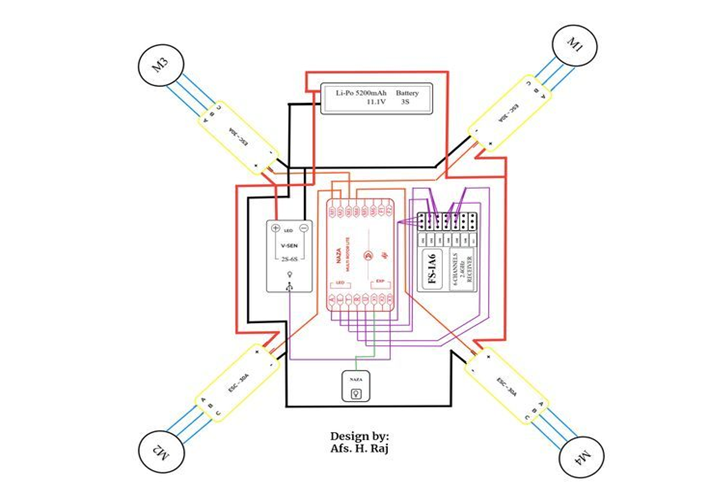
The hexacopter frame was chosen for its lift capacity and redundancy. Modules were mounted at the drone’s base using 3D-printed holders. The flight controller (DJI Naza-M Lite) was installed to maintain flight balance and allow GPS navigation. Power was distributed through a central PDB connected to a 3S LiPo battery. Servo motors powered by the onboard system were used to operate the modules like claws, sprayers, and LED boards.
Block Diagram:-
Hardware And Software Requirement:-
Hardware:-
– DJI Naza-M Lite Flight Controller
– 6 × 920KV Brushless Motors
– 6 × 30A BLHeli ESCs
– GPS Module
– 11.1V LiPo Battery
– Hexacopter Frame
– Servo Motors (180° & 360°)
– 2.4 GHz FlySky i6 Transmitter/Receiver
– Camera, Sprayer, LED Panel, Claw Module
The hexacopter’s motors are rated at 920KV, offering 500g thrust per motor. ESCs ensure each motor receives precise power control. The flight controller stabilizes pitch, roll, and yaw based on GPS input and gyroscope data. The servo-controlled modules include a mechanical claw for dropping objects, a sprayer system with nozzles, and LED display for visual communication. All components are fixed onto a lightweight carbon frame.
Software:-
– Arduino IDE for programming servo operations
– DJI Naza Assistant for flight tuning and fail-safe configuration
– Mission Planner for route planning (optional)
The DJI Naza-M Lite is configured using Naza Assistant. Flight parameters such as gains, control modes, and failsafe options are set here. Servo control codes are written in Arduino IDE and uploaded via USB to an Arduino Nano or similar microcontroller. For autonomous operations, Mission Planner can be used to upload pre-defined flight paths and actions.
Performance Analysis:-
Performance was measured using field trials for each module:
– Flower drop: Accurate to 1m radius
– Food delivery: Handled up to 1.5 kg
– First aid: Delivered box within ±1.2m accuracy
– Spraying: Covered 20 sqm per battery cycle
– LED visibility: Readable from 50 meters
– Surveillance: Clear feed up to 600m LOS
Circuit Designing Procedure for Project:-
1. Calculate current requirement per motor and total power draw.
2. Choose ESCs that support this load.
3. Design central distribution for battery power.
4. Connect Arduino outputs to servo signal wires.
5. Integrate GPS UART lines with the controller.
6. Test each sub-system independently.
Actual Setup:-
Drone assembled on a carbon fiber hexacopter frame. Battery mounted centrally. Each module attached using bolts and servo linkages. Live camera feed connected to Android ground station. Tests conducted in open ground with GPS lock and calibrated compass.
Applications:-
Agriculture: Crop spraying, pest control
Health: Emergency medical delivery
Events: Flower dropping during processions
Commercial: LED advertising on-the-go
Disaster Management: Rapid aid delivery
Surveillance: Monitoring public areas, borders
Future Scope:-
– Add LiDAR and AI-based image processing
– Enable 4G/5G telemetry for long-distance missions
– Develop foldable frame for portability
– Attach solar panel boosters
– Integrate thermal cameras for night surveillance
List Of Components Required For Project:-
– DJI Naza-M Lite Flight Controller
– GPS Module
– 6 × Brushless Motors (920KV)
– 6 × ESCs (30A)
– 2 × Servo Motors
– 1 × LiPo Battery (11.1V)
– Hexacopter Frame
– Propellers
– Arduino Nano
– LED Display Module
– Sprayer Nozzle
– Wireless Camera
Result:-
All modules achieved intended outcomes:
– Flower drop: 95% accuracy
– Delivery: Safe payload release up to 1.5kg
– Surveillance: Live feed with minimal lag
– Sprayer: Effective coverage and spray rate
– LED: High visibility in open daylight
– Return-to-home: Consistently accurate within 1.5m
Conclusion And Overview:-
The proposed system successfully demonstrates a modular, multi-purpose drone capable of executing six independent tasks. Its reconfigurability and cost-efficiency make it suitable for wide-scale adoption in agriculture, emergency services, and public utility sectors. The successful tests validate both the mechanical and software integration of the platform.
References:-
1. DJI Naza-M Lite User Guide
2. IEEE UAV Research – 2020–2022 Editions
3. MIT Modular Drone White Paper, 2021
4. Stanford Robotics Journal, 2020
5. Elsevier: Agricultural UAVs and Disaster Management Applications, 2019